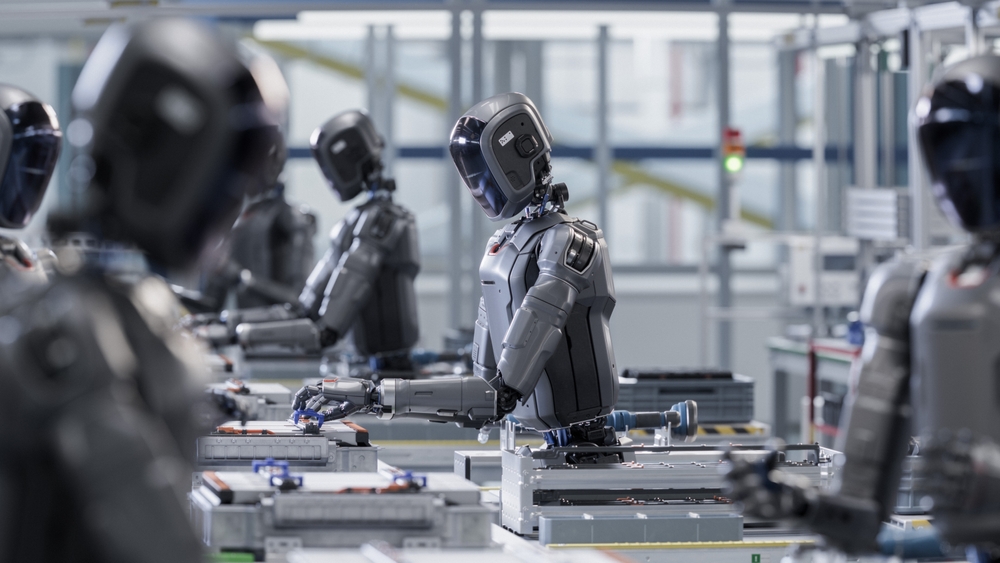
世界の皆さん、おはようございます、こんにちは、こんばんは。BCG Xの高柳です。先日、米国の企業が家庭用人型ロボットの販売開始を発表しました。ヒューマノイド(人型ロボット)の開発が加速している背景には、生成AI、特に大規模言語モデル(LLM)の進化があります。今回は、AIで駆動する最新ロボットの世界をのぞいてみましょう。
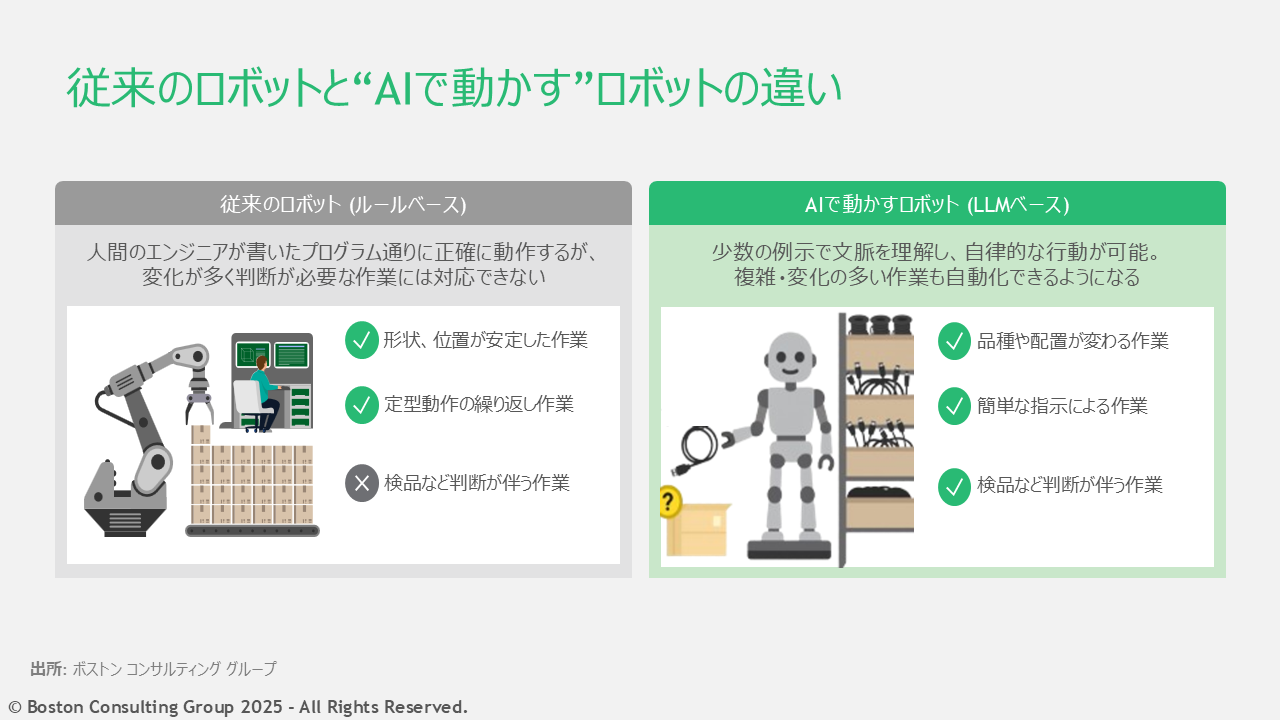
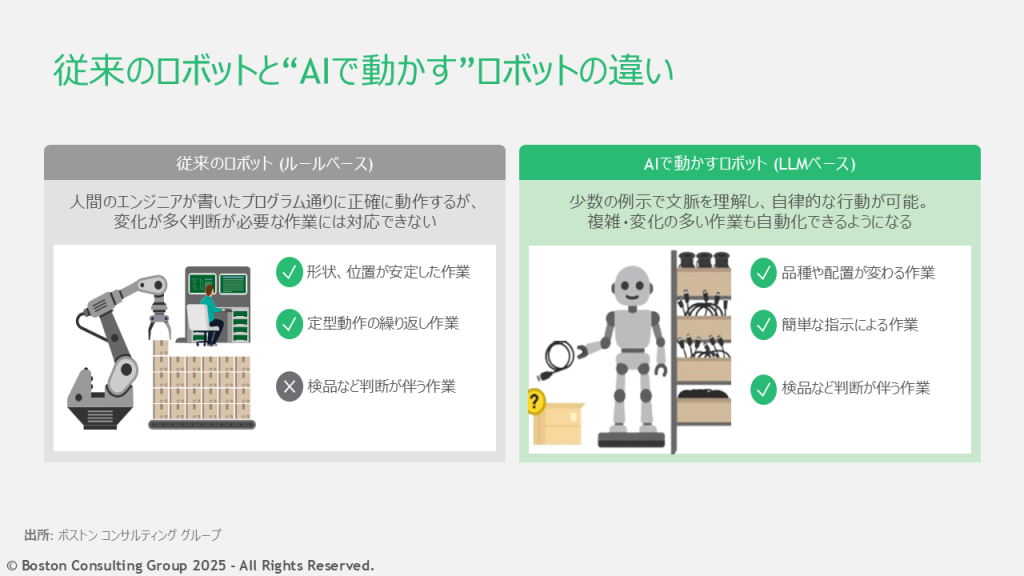
①ロボットはプログラムで動くルールベースから、AIで動くLLMベースに進化
②デジタル空間と現実世界を組み合わせて動作を学習させることで、効率的な開発が可能に
③人間向けの設備が使えるという利便性から、ヒューマノイド(人型ロボット)の開発が加速。ただし製造コストや動作スピードには課題あり
「一家に一台ロボット」の時代が、いよいよ現実味を帯びてきています。例えば、米国のスタートアップFigure AIが開発した人型ロボットは、洗濯物を洗濯機に入れたり、食洗機に食器を並べたりといった家事をこなせるレベルに到達していて、家庭への導入に向けた実証テストも始まっています(こちらの動画を見てみてください)。
ロボットは「ルールベース」から「LLMベース」へ
これまでのロボットは、エンジニアが書いたプログラムに従って「ルールベース」で作動するものでした。決められた動作を正確に繰り返すのは得意でしたが、柔軟な判断はできず、想定外の状況には対応できないという限界がありました。
一方でいま注目を集めているのが、最新の LLMを搭載した「AIロボット」です。AIロボットの最も大きな特徴は、「考える力」が飛躍的に向上したこと。これによりロボットは、まるで人間のように状況を理解し、臨機応変に動けるようになります。
例えば、「コップを取る」という動作を比べてみましょう。
従来のロボットは、「この位置にあるこのコップを、この角度でつかむ」といった手順をプログラミング言語で細かく指示しておく必要がありました。対してLLMを搭載したロボットは、人間の言葉=自然言語で「コップを取って」と頼むだけで、周囲を観察してコップを見つけ、形や持ちやすさを判断し、最適な方法で手に取ることができます。
一見すると単純なことのようにも思えますが、この「自ら考えて行動できる」という柔軟さこそがロボット工学における革命的進化なのです。
数千体ものロボットがデジタル空間で同時に学習する
プログラミングで動かすわけではないのなら、AIロボットは何をもとに動くのでしょうか? AIロボットの開発では、2つのアプローチを組み合わせています。
1つ目は、コンピューター上のデジタル空間でロボットに動きを練習させ、生成したデータを「脳」として現実のロボットに移植する方法です。現実世界では1台のロボットが1つの動作を覚えるのに何時間もかかりますが、デジタル空間なら何百台ものロボットに24時間休まず学習させることができ、圧倒的に学習スピードが上がります。しかも、動作を失敗したとしても仮想空間では壊れる心配がありませんから、コストも現実世界で訓練を実施するよりはるかに小さい。
実際にNVIDIAは、デジタル空間の中で数千体ものロボットを同時並行的に学習させる仕組みを開発しました(こちらの動画を見てみてください)。障害物の配置や地面の状態などを変えた多様なシナリオ下で無数のロボットが動く様子は、SF感がありますね。
2つ目は、現実世界でデータを集める方法です。仮想空間でいくら練習しても、現実世界には予測できない要素がたくさんあります。例えば床の滑りやすさや凸凹具合、物の重さ・形状の微妙な違い、気候条件、照明の加減などです。そのため、デジタル空間でのシミュレーションで基礎動作を学んだ後は、現実世界でさらに経験を積ませる必要があります。
動きの覚えさせ方としては、モーションキャプチャ技術で人間の動きをそのままトレースさせ、正解となる動作を記録します。あるいは、ロボットにカメラや距離センサーを搭載し、遠隔操作で動かしながら正しい動きを撮影・計測するというやり方もあります。
この2つのアプローチを組み合わせることで、効率的かつ実用的なロボットが育っていきます。
ヒューマノイドの開発が加速
冒頭でも触れた通り、ここ数年で著しい発展を遂げているのは、人間のような姿をした「ヒューマノイド(人型ロボット)」です。これまではロボットといえば、腕のような形をした多関節ロボット、コンベヤ式の搬送ロボットなど、人の姿をしていない「産業用ロボット」の開発が中心でした。しかしAIの進化によって、ロボットにもより人間に近い能力を持たせられる可能性が見えてきたことで、領域特化の産業用に加え、汎用的に活用できる人型ロボットの開発競争も一気に加速しています。
人型ロボットが注目される理由の1つは、 人間向けの道具や設備をそのまま使えることにあります。モップ、レンチ、医療機器、洗濯機、耕作機械や台車、階段、エレベーター、扉に至るまで、人のために作られたものをほぼ無改造で扱えます。既存環境を活かせるということは、導入コストが低いという大きなメリットです。
第2の理由は、知識やスキルを人間の言葉で伝えられることです。動作を教える際に「レバーを手前に引き、ボタンを3秒押す」といった人間の手順書をそのまま使え、実演・VR・モーションキャプチャを通じてコツも伝えやすい。そのため、1台のロボットを家庭の掃除や洗濯、倉庫のピッキング、小売店での品出し、工場のバルブ操作など多様な現場に横展開しやすくなります。
さらに、人型ロボットはソフトウェア更新で新しい機能を追加できるプラットフォーム性を持ちます。人間の生活環境にあわせた安全規格で動作するため、社会に受け入れられやすいという点も、普及を後押ししていくと考えられます。
ただし今のところ製造コストは1台あたり数千万円と高額で、新しい動作を覚えるのに数十〜百時間分もの学習が必要です。大量生産が難しく、動作スピードなどハードウェア面でも解決すべき課題が多数あります。人間の手を離れて自律的に動くまでにはもう少し時間がかかりそうで、当面は人間と協働する形が主流になるでしょう。
次回もお楽しみに、Catch you later!

高柳 慎一
ボストン コンサルティング グループ
BCG X プリンシパル
北海道大学理学部卒業。同大学大学院理学研究科修了。総合研究大学院大学複合科学研究科統計科学専攻博士課程修了。博士(統計科学)。株式会社リクルートコミュニケーションズ、LINE株式会社、株式会社ユーザベースなどを経て現在に至る。デジタル専門組織BCG Xにおける、生成AIを含むAIと統計科学のエキスパート。